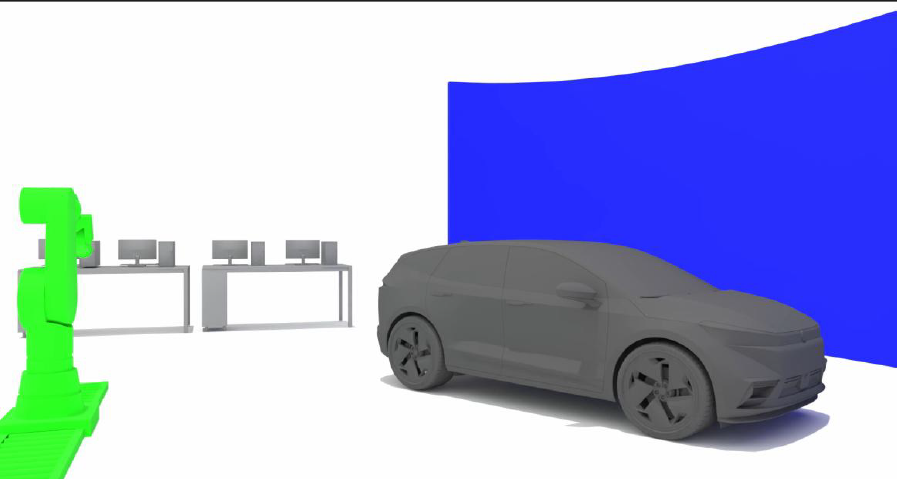
This collaborative project between WPP, Boston Dynamics, and Canon reimagines the future of content production bycombining robotics, AI, and virtual production. For the firsttime, Boston Dynamics’ Atlas robot was used behind thecamera—pushing creative boundaries in cinematography whileimproving precision and safety on set. By leveraging roboticmovement and AI-driven workflows, the project demonstrateshow emerging technologies can capture dynamic, previously unreachable shots in challenging or hazardous environments.